Flexible and Easy-to-use Programming Methods
Painting cycles can be created through a Windows-based interface, which is included in the robot’s teach pendant or installed in a Personal Computer. The cycle can be programmed by the robot itself (self-learning) or by the human user. Either methods will ensure the high quality results a painting robot can produce. The programs can be updated with a new one endlessly, allowing full flexibility when different workpieces are required to be painted.
For more information, contact us now!
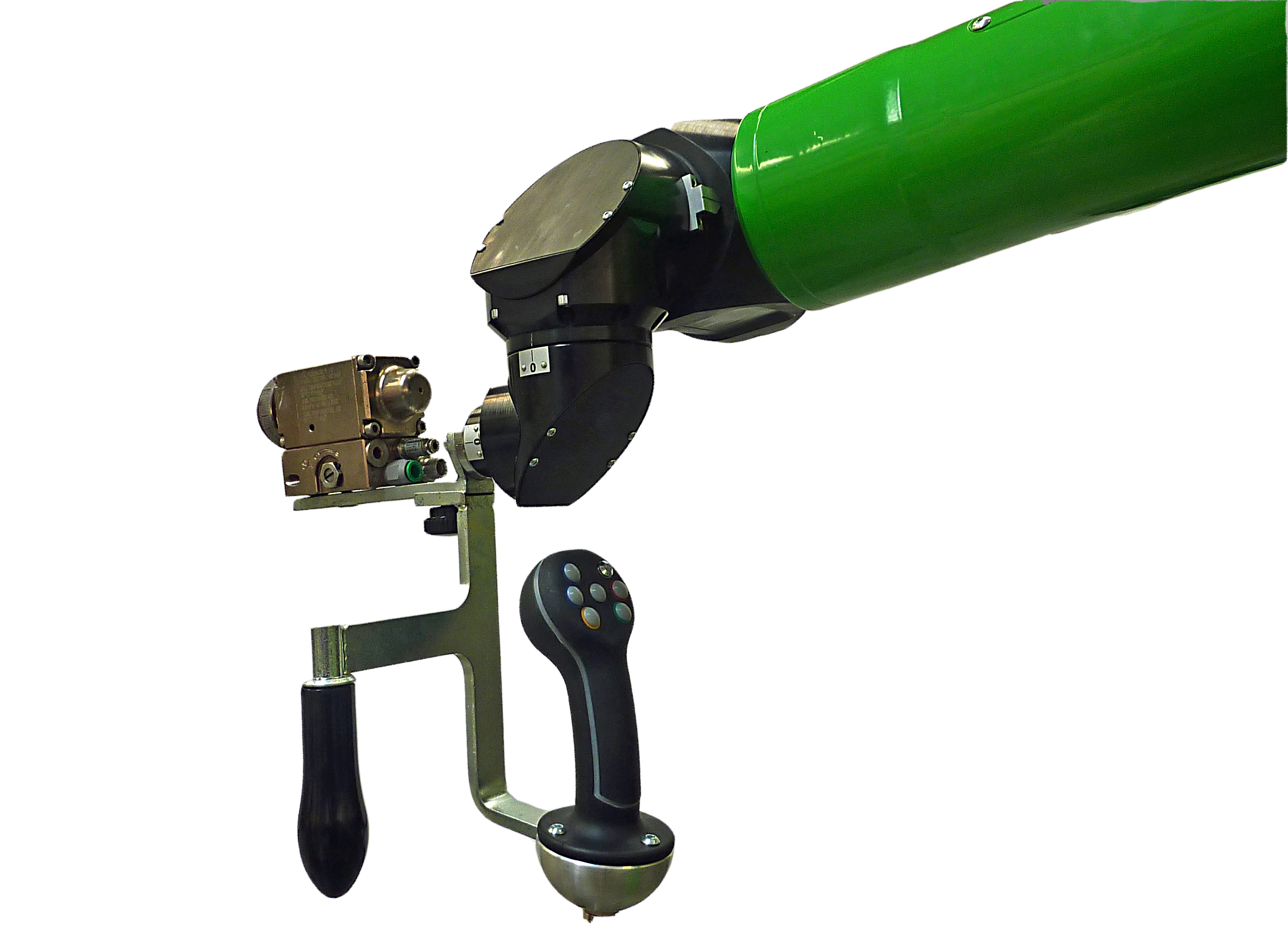
Joystick/Lead-through Programming
A joystick attachment is available to be added to the end-effector along with the spray paint heads, including the trigger. The robot will enter a ‘limp’ state, which make all the robot’s joints to be flexible. An operator can then move and guide the robot arm to spray paint a sample product. The positions, speed and when to trigger the spray paint are then recorded and logged back into the robot’s memory. The program can be run afterwards and the robot will mimic the exact movement/path and amount of paint needed for the same product.
This method is the easiest and quickest way to program the spray painting robot. A video of this programming method can be found here.

Mobile Panel/Teach-pendant Programming
This programming type is the most commonly used for any industrial robots. CMA Robotics offers a colour touch-screen display equipped with a dead-man switch, a keyboard and a six-degrees of freedom analog joystick. The robot can be moved to the desired positions using the handheld unit, then these points can be recorded and stored for later use. A Point-To-Point (PTP) program is then generated for the robot’s painting cycle. Any additional positioners that are powered can also be controlled through this unit. It is also possible to receive and send signals, making the robot integratable to an existing production line.
Off-line Programming
The whole robot cell can be represented graphically through a software available from CMA Robotics. This 3D model will display the robot, positioners and the workpiece. Without the need to be connected to the robot, the software allows simulation of how a painting cycle will look. After all parameters and programs are optimised, it can be uploaded to the robot for operation.
One of the advantage of off-line programming is to be able to write a new program on the simulator without having to stop the robot. Exporting existing program to edit it is also possible.
A video of this programming method can be found here.

Self-generated Program via a Vision System
CMA Robotics offers state of the art solution for complex shape workpieces. Items can be arranged horizontally on a conveyor or hanging vertically using an overhead conveyor to be painted by the robot. Before the painting station, they will first pass through a scanner which maps the item in a form of data points. These are then transmitted to a personal computer which has the software to create a program based on these points. From here instructions are then sent to the robot to begin the spray painting process. Each item can differ in sizes and shapes, the program will automatically adapt once a different item is scanned.
A video showing this application can be seen here.
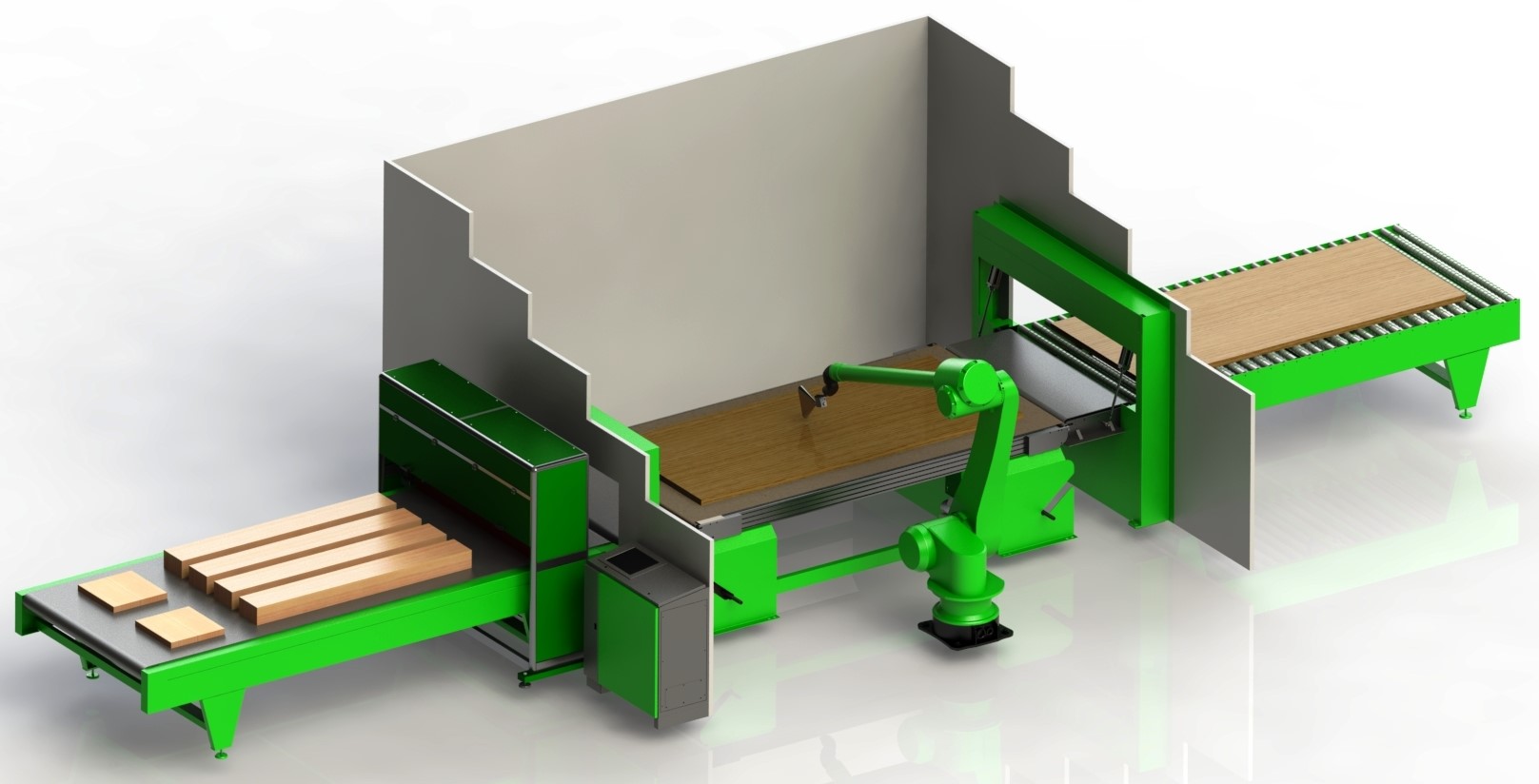
Horizontal Painting
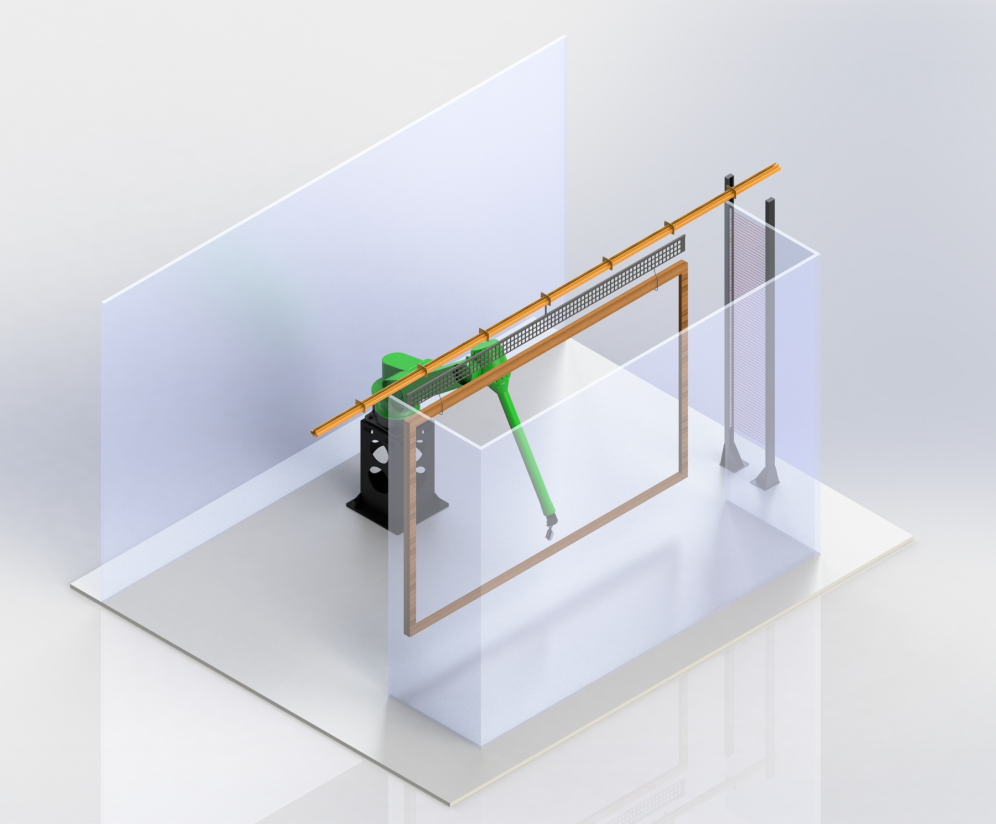
Vertical Painting
We can also work with various brands of robots, such as FANUC, YASKAWA, ABB, KAWASAKI, PANASONIC, MOTOMAN, OTC, NACHI, DENSO, KUKA, MITSUBISHI, EPSON, STAUBLI, FOXCONN, COMAU, OMRON, and UNIVERSAL Robots